

Vinkelmomentmengde, bevaring, eksempler, øvelser
- 4822
- 1201
- Prof. Theodor Gran
Han kantete momentum o Mengde vinkelbevegelse er, for rotasjonsbevegelsen, hva det lineære øyeblikket er for oversettelsesbevegelsen. Det er en vektorstørrelse som kjennetegner rotasjonen av en punktlig partikkel eller et utvidet objekt rundt en akse som passerer gjennom et punkt.
Dette betyr at når vinkelmomentet blir beregnet, må rotasjonsaksen spesifiseres praktisk.
Fra og med et materielt punkt med masse m er vinkelmomentet betegnet av L, det lineære øyeblikket som p og partikkelenes plassering med hensyn til en akse som passerer gjennom et bestemt punkt eller er r, så:
L = r x p
Fet bokstaver er forbeholdt vektorstørrelser og korset betyr at vinkelmomentet er vektorproduktet mellom posisjonsvektoren r Og det lineære øyeblikket p av partikkelen. Vektoren som er resultatet av et vektorprodukt er vinkelrett på planet dannet av de deltakende vektorene.
Dette betyr at retningen og følelsen av L De kan bli funnet ved regel om høyre hånd for kryssproduktet.
I det internasjonale systemet med enheter er enhetene med vinkelmoment kg⋅m2/s, som ikke har et spesielt navn. Og for en utvidet kropp, som er sammensatt av mange partikler, utvides den forrige definisjonen enkelt.
[TOC]
Mengde vinkelbevegelse
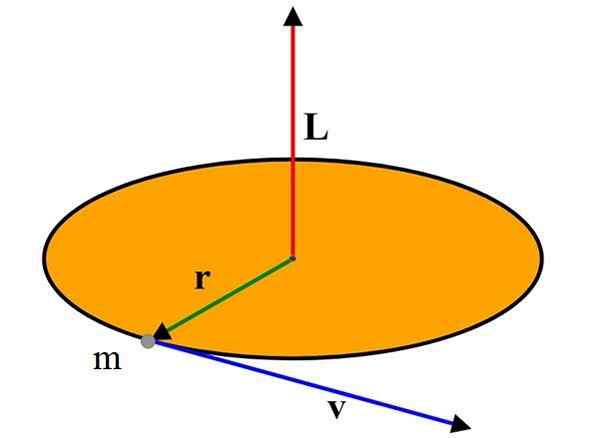
Forholdet mellom vinkelmomentvektorene med hensyn til et gitt punkt eller lineær tid for en punktlig partikkel som beveger seg i en sirkel. Kilde: Modifisert av F. Zapata fra Wikimedia Commons. Størrelsen på vinkelmomentvektoren er i henhold til definisjonen av vektorprodukt:
L = r⋅m⋅v⋅sen ϕ = mv (r⋅sen ϕ) = mvℓ
Hvor ϕ er vinkelen mellom vektorene r og v. Da ℓ = r sen ϕ er den vinkelrett avstand mellom linjen til v Og poenget eller.
Når det.
Derfor sen 90º = 1 og størrelsen på L er:
L = m⋅r⋅V
Treghetens øyeblikk
Treghetens øyeblikk av en stiv kropp beskriver kroppens treghet mot rotasjon rundt en viss akse.
Det avhenger ikke bare av kroppens kropp, men også av avstanden til rotasjonsaksen. Dette er lett forståelig når du tenker at for noen gjenstander er det lettere å rotere med hensyn til noen akser enn til andre.
For et partikkelsystem er treghetsmomentet, betegnet ved brev I, gitt av:
Kan tjene deg: vinkelakselerasjonI = ∑ rYo2 ΔmYo
Hvor ΔmYo Det er en liten del av deigen og rYo Det er avstanden fra rotasjonsaksen. Et utvidet legeme er sammensatt av mange partikler, derav dens øyeblikk av treghet er summen av alle produkter mellom masse og avstand, av partiklene som komponerer den.
Hvis det er et utvidet legeme, endres sommeren til et integral og Δm Det blir en massedifferensial DM. Integrasjonsgrenser avhenger av objektgeometri:
I = ∫M (r2) DM
Treghetsbegrepet er nært knyttet til vinkelmomentet til et utvidet objekt, som vi vil se da.
Vinkelmoment av et partikkelsystem
Tenk på et partikkelsystem, sammensatt av masse ΔmYo som roterer etter en sirkel i flyet Xy, Hver har en lineær hastighet relatert til sin vinkelhastighet, sistnevnte for alle partikler:
vYo = ΩrYo
Hvor rYo Det er avstanden til rotasjonsaksen eller. Så størrelsen på vinkelmoment er:
LYo = ΔmYo. rYo. (ΩrYo) = rYo2Ω ΔmYo
Systemets vinkelmomentum vil bli gitt av summen:
L = Ω ∑ rYo2 ΔmYo
Vi identifiserer raskt treghetsmomentet, som definert i forrige seksjon, og derfor forblir størrelsen på dens vinkelmoment som dette:
L = iω
Som vi har sagt at partikkelsystemet var i XY -planet, viser det seg at vinkelmomentet er rettet langs Z -aksen, vinkelrett på nevnte plan. Betydningen er gitt av rotasjonen: det kantete øyeblikket.
En utvidet kropp kan deles inn i skiver, hver med vinkelmomentum gitt av L = iω Regissert langs Z -aksen. Hvis objektsymmetriaksen sammenfaller med Z -aksen, er det ikke noe problem, siden selv for punkter som ikke er i XY -planet, blir komponentene i vinkelmomentet vinkelrett på nevnte akse kansellert.
Vektorialt:
L = JegΩ
Denne ligningen er gyldig for tre -dimensjonale objekter som dreier seg om en symmetriaks.
Når vinkelmomentet varierer?
Når en nettokraft virker på en partikkel eller et legeme, kan dets lineære øyeblikk endres, og følgelig vil den også gjøre sitt vinkelmomentum. For å vite når vi varierer, bruker vi derivatet, som vil gi oss endringshastigheten over tid, hvis det er:
Kan tjene deg: silisiumoksyd (SiO2): struktur, egenskaper, bruk, skaffelse)
Bruke produktregelen for derivatet:
+\left&space;(\mathbfr\times&space;\fracd\mathbfpdt&space;\right&space;))
Begrepet v x mv Det er ugyldig, siden det er produktet av en vektor med seg selv, og i den andre termen finner vi nettokraften F = mtil, derfor:

Vektorproduktet r x F Det er ikke noe annet enn dreiemomentet eller øyeblikket av netto torsjon, noen ganger betegnet med den greske teksten τ eller som M, Alltid dristig, siden det er en vektormengde. Deretter, i analogi med det lineære øyeblikket, varierer vinkelmomentet så lenge det er et dreiemoment eller et øyeblikk av netto torsjon:
dL/dt = M
Vinkelmomentbevaring
Fra de foregående seksjonene har vi sett det:
dL/dt = M
Det vil si at vinkelmomentet varierer når det er et øyeblikk av netto torsjon. Hvis det ikke er noe øyeblikk av netto torsjon, så:
dL/dt = 0 → L det er konstant
Med andre ord:
Innledende vinkelmomentum = endelig vinkelmomentum
Dette resultatet er fremdeles gyldig i tilfelle at et organ ikke er stivt, som vi vil se i følgende eksempler.
Eksempler
Vinkelmomentet er en viktig størrelse som blir avslørt i en rekke situasjoner, som demonstrerer hvor universell det er:
Kunstnerisk skøyter og annen idrett
 På venstre side begynner skateren å snu med utvidede armer, til høyre, krymper armene mot kroppen og krysser bena for å øke svinghastigheten. Kilde: Wikimedia Commons.
På venstre side begynner skateren å snu med utvidede armer, til høyre, krymper armene mot kroppen og krysser bena for å øke svinghastigheten. Kilde: Wikimedia Commons. Hver gang et organ som vender kontrakter, øker rotasjonshastigheten, dette kjenner isskøytelene godt.
Dette skyldes at når vi trekker inn armer og ben, avtar treghetsmomentet jeg, ettersom avstanden mellom delene avtar, men når vinkelmomentet er bevart, for å holde iω -produktet konstant, må vinkelhastigheten øke.
Dette er gyldig ikke bare i skøyter, men også i idrett og aktiviteter som svinger må.
Katter står

Katter fikser dem alltid til å lande på alle fire når de faller. Selv om de ikke har en mengde innledende bevegelse, sørger de for at de raskt vender ben og hale for å endre rotasjons treghet og fikse dem for å stå opp.
På samme måte mens manøvrering er deres vinkelmoment ugyldig, siden rotasjonen deres ikke er kontinuerlig.
Bevegelsen av en frisbee

En frisbee må lanseres ved å trykke den for å fly, siden ellers faller den. Faktisk, det kantete øyeblikket.
Det kan tjene deg: Stasjonære bølger: Formler, egenskaper, typer, eksemplerBallene i sport

Baseball, fotball, basketball og andre sportsballer har vinkelmomentum. Ettersom de er sfæriske har de et øyeblikk av treghet, og i løpet av spillet blir de rotert. Som treghetsmoment er en sfære:
I = (2/5) MR2
Hvor m er massen på ballen og r sin radius, er treghetsmomentet med hensyn til en viss akse (fast):
L = (2/5) MR2Ω
Månefestet
Månen beveger seg bort fra jorden, siden jordens rotasjon av jorden avtar på grunn av friksjonen mellom de store vannmassene og bakgrunnen på havet.
Earth-Luna-systemet beholder sitt kantete øyeblikk.
Atomet
Det første postulatet av Bohrs atommodell sier at et elektron bare opptar baner der vinkelmomentet er et helt multiplum av H/2π, Hvor h er Plancks konstant.
Trening løst
En tynn stålstang har en masse på 500 g og en lengde på 30 cm. Dreier seg om en akse som passerer gjennom senteret med en hastighet på 300 revolusjoner per minutt. Bestem modulen for mengden av vinkelbevegelse.
Løsning
Vi trenger treghetsmomentet til stangen som refererer til en akse som går gjennom sentrum. Konsulenting av treghetsmoment er funnet at:
I = (1/12) ml2 = (1/12) × 0.5 kg x (30 × 10-2 m)2 = 3.75 × 10-3 kg.m2
Siden det er en utvidet kropp, som vi kjenner vinkelhastigheten, bruker vi:
L = iω
Før vi transformerer vinkelhastighet eller vinkelfrekvens Ω til radianer/s:
Ω = (300 revolusjoner/minutt) × (1 minutt/60 sekunder) x (2π radianer/revolusjon) = 10 π rad/s
Erstatte:
L = 3.75 x10-3 kg⋅m2 × 10 π rad/s = 0.118 kg⋅m2 / s
Referanser
- Bauer, w. 2011. Fysikk for ingeniørfag og vitenskap. Volum 1. Mc Graw Hill.
- Giambattista, a. 2010. Fysikk. 2. Ed. McGraw Hill.
- Giancoli, d. 2006. Fysikk: Prinsipper med applikasjoner. 6. Ed Prentice Hall.
- Knight, r. 2017. Fysikk for forskere og ingeniørfag: En strategitilnærming. Pearson.
- Serway, r., Jewett, J. (2008). Fysikk for vitenskap og ingeniørfag. Volum 1. 7. Ed. Cengage Learning.
- Tippens, p. 2011. Fysikk: konsepter og applikasjoner. 7. utgave. McGraw Hill.