

Vektorer i verdensrommet hvordan du kan graf, applikasjoner, øvelser
- 2143
- 452
- Prof. Oskar Aas
EN vektor i rommet Det hele er representert av et koordinatsystem gitt av x, og og z. Nesten alltid flyet Xy Det er planet for den horisontale overflaten og aksen z representerer høyden (eller dybden).
De kartesiske koordinataksene vist i figur 1, del rommet i 8 regioner som kalles Octavers, analog med hvordan aksene x - og Del flyet i 4 kvadranter. Vi vil da ha 1 oktant, 2. ocanto og så videre.
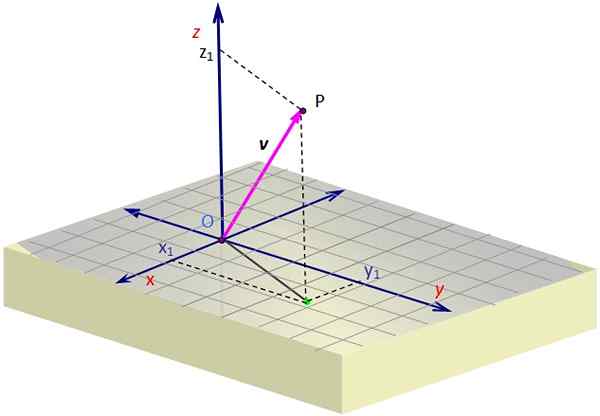
Figur 1. En vektor i rommet. Kilde: Selvlaget. Figur 1 inneholder en representasjon av en vektor v i rommet. Noe perspektiv er nødvendig for å skape illusjonen av tre dimensjoner på skjermen på skjermen, som oppnås ved å trekke en skrå visning.
For å tegne en 3D -vektor, må du hjelpe de stiplede linjene som bestemmer koordinatene til projeksjonen eller "skyggen" av nettet v Over overflaten x-og. Denne projeksjonen begynner i O og slutter på det grønne punktet.
Når du er der, må du fortsette med vertikalen til høyden (eller dybden) som er nødvendig i henhold til verdien av z, til du kommer til P. Vektoren er hentet fra O og slutter i P, som i eksemplet er i 1. OCant.
[TOC]
applikasjoner
Vektorer i verdensrommet er mye brukt i mekanikk og andre grener av fysikk og ingeniørfag, siden strukturene som omgir oss krever geometri i de tre dimensjonene.
Posisjonsvektorer i rommet brukes til å plassere objekter med hensyn til et referansepunkt kalt opprinnelse ENTEN. Derfor er de også nødvendige verktøy i navigasjonen, men det er ikke alt.
Kan tjene deg: Elektromagnetiske bølger: Maxwell -teori, typer, egenskaperKreftene som virker på strukturer som bolter, støtter, kabler, stag og mer er vektor natur og er orientert i rommet. For å vite virkningen av den, er det nødvendig å kjenne adressen din (og også søknadspunktet ditt).
Og ofte er retningen til en styrke kjent med to punkter i verdensrommet som tilhører dens handlingslinje. På denne måten er styrken:
F = F eller
Hvor f er størrelsen eller modulen for kraft og eller Det er enhetsvektoren (modul 1) rettet langs handlingslinjen til F.
3D -vektornotasjon og representasjoner
Før du løser noen eksempler, vil notasjonen av 3D -vektorer bli gjennomgått kort.
I eksemplet på figur 1 har vektor V, hvis opprinnelsessted sammenfaller med opprinnelsen eller og hvis avslutning er punkt P, koordinater x og z positivt, mens koordinat og Det er negativt. Disse koordinatene er: x1, og1, z1, som nettopp er koordinatene til P.
Så hvis vi har en vektor knyttet til opprinnelsen, det vil si, hvis utgangspunkt sammenfaller med O, er det veldig enkelt å indikere koordinatene, som vil være de av det ekstreme punktet eller P. For å skille mellom et punkt og en vektor, vil vi bruke for de nyeste fetme bokstavene og parentesene, som dette:
v = < x1, og1, z1 >
Mens punkt P er betegnet med parenteser:
P = (x1, og1, z1)
En annen representasjon benytter seg av enhetsvektorer Yo, J og k som definerer de tre plassbeskrivelsene i aksene x, og og z henholdsvis.
Disse vektorene er vinkelrett på hverandre og utgjør en Ortonormal base (Se figur 2). Dette betyr at en 3D -vektor kan skrives i form av dem som:
Kan tjene deg: bølgende bevegelse: egenskaper, bølger typer, eksemplerv = vx Yo + vog J + vz k
Vinkler og cosenos direktører av en vektor
Figur 2 viser også regissørene γ -vinkler1, γ2 og γ3 enn vektoren v henholdsvis med aksene x, og og z. Når du kjenner disse vinklene og vektorenes størrelse, er dette fullstendig bestemt. I tillegg oppfyller styremedlemmers kosiner følgende forhold:
(Cos γ1)2 + (Cos γ2)2 + (Cos γ3)2 = 1
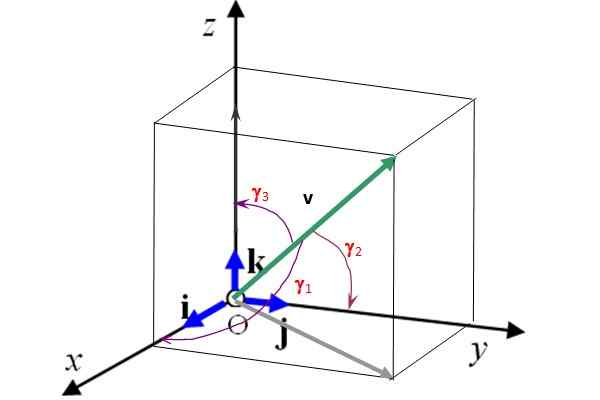 Figur 2. Enhetsvektorer I, J og K bestemmer de 3 foretrukne romets retninger. Kilde: Selvlaget.
Figur 2. Enhetsvektorer I, J og K bestemmer de 3 foretrukne romets retninger. Kilde: Selvlaget. Løste øvelser
-Oppgave 1
I figur 2 er y -vinklene1, γ2 og γ3 enn vektoren v av modul 50 form med koordinataksene er henholdsvis: 75.0º, 60.0º og 34.3. Finn de kartesiske komponentene i denne vektoren og representer den med tanke på enhetsvektorene Yo, J og k.
Løsning
Projeksjonen av vektoren v på aksen x er vx = 50 . Cos 75º = 12.941. Tilsvarende projeksjonen av v på aksen og er vog = 50 cos 60 º = 25 og til slutt på aksen z er vz = 50. cos 34.3. = 41.3. Nå v kan uttrykkes som:
v = 12.9 Yo + 25.0 J + 41.3 k
-Oppgave 2
Finn spenninger i hver av kablene som holder bøtta på figuren som er i likevekt, hvis vekten av dette er 30 n.
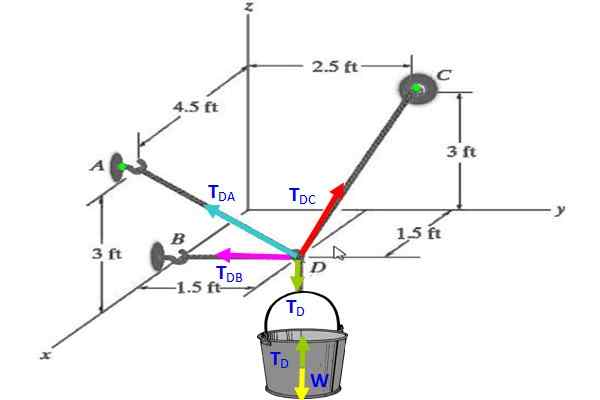 Figur 3. Spenningsdiagram for oppgave 2.
Figur 3. Spenningsdiagram for oppgave 2. Løsning
På bøtta indikerer det frie kroppsdiagrammet det TD (grønn) kompenserer for vekt W (gul), derfor tD = W = 30 n.
I knuten, vektoren TD Det er rettet vertikalt ned, da:
TD = 30 (-k) N.
For å etablere de gjenværende spenningene må du følge følgende trinn:
Trinn 1: Finn koordinatene til alle punkter
A = (4.5; 0; 3) (A er på veggplanet X-Z)
B = (1.5; 0; 0) (B er på x -aksen)
Kan tjene deg: adresse (fysisk)C = (0, 2.5, 3) (C er på veggplanet og z)
D = (1.5; 1.5; 0) (D er på det horisontale planet x-og)
Trinn 2: Finn vektorene i hver retning ved å trekke fra koordinatene til slutten og begynnelsen
Gir =
DC =
Db =
Trinn 3: Beregn moduler og enhetsvektorer
En enhetsvektor oppnås ved uttrykk: eller = r / r, med r (ved fet skrift) å være vektoren og r (uten fet) modulen til nevnte vektor.
Da = (32 + (-1.5)2 + 32)½ = 4.5; DC = ((-1.5) 2 + 12 + 32)½ = 3.5
ellerGir = 4.5 =
ellerDC = 3.5 =
ellerDb =
ellerD =
Trinn 4: Uttrykk alle spenninger som vektorer
TGir = TGir ellerGir = TGir
TDC = TDC ellerDC = TDC
TDb = TDb ellerDb = TDb
TD = 30
Trinn 5: Bruk den statiske likevektstilstanden og løse ligningssystemet
Til slutt blir den statiske balansetilstanden brukt på bøtta, slik at vektorsummen til alle krefter på knuten er ugyldig:
TGir + TDC + TDb + TD = 0
Ettersom spenningene er i verdensrommet, vil det føre til et tre ligningssystem for hver komponent (x, og og z) av spenninger.
0.67 tGir -0.43 tDC + 0 tDb = 0
-0.33 tGir + 0.29 tDC - TDb = 0
0.67 tGir + 0.86 tDC +0 tDb - 30 = 0
Løsningen er: tGir = 14.9 n; TGir = 23.3 n; TDb = 1.82 n
Referanser
- Bedford, 2000. TIL. Mekanikk for ingeniørfag: statisk. Addison Wesley. 38-52.
- Figueroa, d. Serier: Fysikk for vitenskap og ingeniørfag. Volum 1. Kinematikk.31-68.
- Fysisk. Modul 8: Vektorer. Gjenopprettet fra: FRTL.Utn.Edu.ar
- Hibbeler, R. 2006. Mekanikk for ingeniører. Statisk. 6. utgave. Continental Editorial Company. 15-53.
- Tilleggskalkulatorvektor. Gjenopprettet fra: 1728.org