

Antiderivative formler og ligninger, eksempler, øvelser

- 2137
- 622
- Daniel Skuterud
EN Antiderivat F (x) av en funksjon F(x) kalles også primitiv eller ganske enkelt den ubestemte integralen av nevnte funksjon, hvis i et gitt intervall Yo, Det er sant, det F '(x) = f (x)
La oss for eksempel ta følgende funksjon:
f (x) = 4x3
Et antiderivat av denne funksjonen er f (x) = x4, siden ved å utlede f (x) av avledningsregelen for kreftene:

Det oppnås nøyaktig f (x) = 4x3.
Imidlertid er dette bare en av de mange antiderivativene til F (x), siden denne andre funksjonen: g (x) = x4 + 2 Det er også, fordi ved å utlede g (x) med hensyn til x, er det den samme oppnås tilbake f (x).
La oss sjekke det:
=4x^3)
Husk at den som er avledet fra en konstant er 0. Derfor til begrepet x4 Du kan legge til hvilken som helst konstant, og dets derivat vil fortsette å være 4x3.
Det konkluderes med at enhver funksjon av den generelle formen f (x) = x4 + C, der C er en virkelig konstant, fungerer som antiderivat av F (x).
Det forrige illustrerende eksemplet kan uttrykkes som følger:
df (x) = 4x3 Dx
Det udefinerte antiderivatet eller integralen uttrykkes med symbolet ∫, derfor:
F (x) = ∫4x3 dx = x4 + C
Der funksjonen f (x) = 4x3 Det kalles Integrering, og C er Integrasjonskonstant.
[TOC]
Eksempler på antiderivativer
Figur 1. Anti -Hotley er ikke annet enn en ubestemt integrert. Kilde: Pixabay. Å finne et antiderivat av en funksjon er enkel i noen tilfeller der derivatene er velkjente. Vær for eksempel funksjonen f (x) = sen x, en uniderivert for det er en annen funksjon f (x), slik at når den avledes oppnås f (x).
Den funksjonen kan være:
F (x) = - cos x
La oss sjekke at det er sant:
F '(x) = (- cos x)' =- (-sen x) = sin x
Derfor kan vi skrive:
∫sen x dx = -cos x + c
I tillegg til å kjenne derivatene, er det grunnleggende og enkle integrasjonsregler for å finne ubestemt antiderivat eller integrert.
Kan tjene deg: påfølgende derivaterVære en virkelig konstant, da:
1.- ∫kdx = k ∫dx = kx + c
2.- ∫kf (x) dx = k ∫f (x) dx
Hvis en H (x) -funksjon kan uttrykkes som sum eller subtraksjon av to funksjoner, er dens ubestemte integral:
3.- ∫h (x) dx = ∫ [f (x) ± g (x)] dx = ∫f (x) dx ± ∫g (x) dx
Dette er linearitetens egenskap.
De Maktregel For integraler kan det etableres på denne måten:

I tilfelle av n = -1 brukes følgende regel:
5.- ∫x -1 Dx = ln x +c
Det er lett å demonstrere at derivatet av ln x Det er nettopp x -1.
Differensiallikninger
En differensialligning er en der det ukjente er som et derivat.
Nå, fra forrige analyse, er det lett å innse at den omvendte operasjonen til derivatet er det udefinerte antiderivatet eller integralen.
La f (x) = y '(x), det vil si avledet fra en viss funksjon. Vi kan bruke følgende notasjon for å indikere dette derivatet:
=y'(x)=\fracdydx)
Det følger umiddelbart det:
dy = f (x) dx
Det ukjente av differensialligningen er funksjonen y (x), den derivatet er f (x). For å fjerne det er det forrige uttrykket integrert på begge sider, noe som tilsvarer å bruke antiderivatet:
∫dy = ∫f (x) dx
Den venstre integralen løses ved integrasjonsregel 1, med k = 1 og dermed blir den etterspurte -awaitten ryddet:
og (x) = ∫f (x) dx = f (x) + c
Og siden C er en virkelig konstant, å vite hvilken som er passende i hvert tilfelle, må uttalelsen inneholde tilstrekkelig tilleggsinformasjon til å beregne verdien av C. Dette kalles Innledende tilstand.
Vi vil se eksempler på anvendelse av alt dette i neste avsnitt.
Kan tjene deg: punktlig estimatAntideriverte øvelser
- Oppgave 1
Bruk integrasjonsreglene for å få følgende udefinerte antiderivater eller integraler av funksjonene som er gitt, forenkle resultatene så mye som mulig. Det er praktisk å bekrefte resultatet ved avledning.
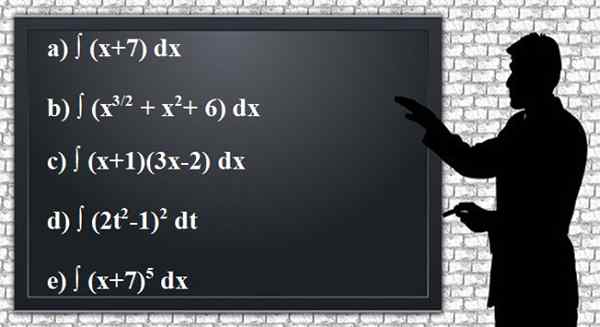 Figur 2. Definerte anteriverte eller integrerte øvelser. Kilde: Pixabay.
Figur 2. Definerte anteriverte eller integrerte øvelser. Kilde: Pixabay. Løsning på
Vi bruker først regel 3, siden integreringen er summen av to vilkår:
∫ (x +7) dx = ∫ xdx +∫7dx
For den første integreringen brukes styrets regel:
∫ xdx = (x2 /2)+C1
I den andre integrerte regel 1 gjelder det å være k = 7:
∫7dx = 7∫dx = 7x + c2
Og nå blir resultatene lagt til. De to konstantene er gruppert i en, generisk kalt C:
∫ (x+7) dx = (x2 /2) + 7x + C
Løsning b
Ved linearitet dekomponerer denne integralen i tre enklere integraler, som maktens styre vil bli brukt til:
∫ (x3/2 + x2 + 6) dx = ∫x3/2 Dx + ∫x2 dx +∫6 dx =

Legg merke til at for hver integral vises en integrasjonskonstant, men de møtes i en enkelt samtale C.
Løsning c
I dette tilfellet er det praktisk å anvende distribusjonens distribusjonsegenskaper for å utvikle integreringen. Deretter bruker du maktens regel for å finne hver integral separat, som i året før.
∫ (x+1) (3x-2) dx = ∫ (3x2-2x+3x-2) dx = ∫ (3x2 + X - 2) dx
Den imøtekommende leseren vil observere at de to sentrale begrepene er like, derfor reduseres de før de integrerer:
∫ (x+1) (3x-2) dx = ∫3x2 dx + ∫ x dx + ∫- 2 dx = x3 + (1/2) x2 - 2x + c
Løsning e
En måte å løse integralen på ville være å utvikle kraft, som det ble gjort i eksempel D. Ettersom eksponenten er høyere, ville det imidlertid være nødvendig å gjøre en variabel endring, for ikke å måtte gjøre en så lang utvikling.
Kan tjene deg: kontinuerlig tilfeldig variabelDen variable endringen er som følger:
U = x + 7
Avleder på begge sider dette uttrykket:
du = dx
Integralen transformeres til en enklere med den nye variabelen, som er løst med maktens regel:
∫ (x+7)5 Dx = ∫ u5 du = (1/6) u6 + C
Til slutt blir endringen returnert for å gå tilbake til den opprinnelige variabelen:
∫ (x+7)5 Dx = (1/6) (x+7)6 + C
- Oppgave 2
En partikkel er opprinnelig i ro og beveger seg langs x -aksen. Dens akselerasjon for t> 0 er gitt ved funksjon a (t) = cos t. Det er kjent at ved t = 0 er posisjonen x = 3, alle i enhetene i det internasjonale systemet. Det blir bedt om å finne hastigheten V (t) og posisjon X (t) i partikkelen.
Løsning
Siden akselerasjon er den første avledet fra hastighet med hensyn til tid, har du følgende differensialligning:
a (t) = v '(t) = cos t
Det følger at:
v (t) = ∫ cos t dt = sin t + c1
På den annen side vet vi at hastigheten igjen er derivatet av posisjonen, derfor integrerer vi igjen:
x (t) = ∫ v (t) dt = ∫ (sin t + c1) dt = ∫sen t dt + ∫c1 dt = - cos t + c1 t + c2
Integrasjonskonstanter bestemmes ut fra informasjonen som er gitt i uttalelsen. Først sier han at partikkelen opprinnelig var i ro, derfor V (0) = 0:
V (0) = sin 0 + c1 = 0
C1 = 0
Da må du x (0) = 3:
x (0) = - cos 0 + c1 0 + c2 = - 1 + C2 = 3 → C2 = 3+1 = 4
Hastighets- og posisjonsfunksjoner er definitivt slik:
v (t) = sen t
x (t) = - cos t + 4
Referanser
- Engler, a. 2019. Integrert beregning. National University of the Coast.
- Larson, r. 2010. Beregning av en variabel. 9na. Utgave. McGraw Hill.
- Gratis matematikkekster. Antiderivativer. Gjenopprettet fra: Matematikk.Liibretexts.org.
- Wikipedia. Antiderivat. Hentet fra: i.Wikipedia.org.
- Wikipedia. Ubestemt integrasjon. Gjenopprettet fra: er.Wikipedia.org.
- « De 13 typene verdier og deres betydning (med eksempler)
- Elektrisk potensiell formel og ligninger, beregning, eksempler, øvelser »